Automatizace ve fyzice: Robot Operating System (ROS)
2024-12-19
Připojte se
Úvod
Co je ROS?
- The Robot Operating System (ROS) - flexibilní framework pro psaní robotického softwaru. Jedná se o soubor nástrojů, knihoven a konvencí, které mají za cíl zjednodušit vytváření složitých chování robotů na nejrůznějších robotických platformách. ROS WIKI
- Open Source
- není to úplně operating system
Historicky
- Stanford (počátek tisíciletí)
- Willow Garage (2007)
- Open Robotics (2013)
Výhody ROS
Umožňuje stavět na znalostech a schopnostech současného stavu robotické technologie a teorie.
Kompatibilita hardwaru a softwaru
Předkompilované algoritmy pro robotiku
Vícevláknové, paralelní zpracování, distribuované výpočty
Kde se používá?
- Výzkum (technika)
- Studenti
- Hobby
- Průmysl - hlavně start-upy
ROS v laboratoři? Možná za pár let.
Architektura
Přehled
Úkol: Chci robota, který se bude přenášet vzorky z ledničky do měřící aparatury
- Jak má robot vypadat?
- Jaké hlavní prvky nebo součásti jsou pro robota potřebné?
Jak funguje systém ROS?
Systém propojených nodes
- každý uzel představuje jinou součást robotického systému
- Laser
- Kinematika pohonu
- Navigace
- Manipulátor
- atd.
Hardware a software
Každý uzel může mít zdrojový kód, spustitelné soubory a datové soubory
- C++
- Python
- značkovací jazyky jako (XML, YAML)
Existuje mnoho připravených nodes
- hotoví roboti (Adept, Clearpath, UR, Meca500)
- LIDAR (SICK, RPLidar atd.) a kamery (webová kamera, Kinect, Opti-track).
- Ovladače motorů (Roboteq, ROSARIA)
ROS komponenty
- ROS Master service registruje ostatní uzly v systému ROS
- běží jako první
roscore
- každý node je pak další principielně nezávislý proces
Komunikace
Uzly komunikují třemi různými způsoby.
- topics - publikování a přihlašování k odběru zpráv
- parameter server - statická data
- services - volání podprogramů (RPC - remote procedure call)
- model
request --> reply
- model
- actions - dlouhotrvající podprogramy, jdou zrušit v půlce, skončí callbackem
Předávání zpráv
Uzly (nodes) mohou komunikovat prostřednictvím publish a subscribe různých témat.
Téma je informace generovaná publikujícím uzlem, které jsou zpřístupněny odebírajícímu uzlu.
- Uzel může téma publikovat. Tento uzel je
publisher. - Uzel se může přihlásit k odběru tématu. Tento uzel je
subscriber. - Většina uzlů publikuje a odebírá více témat.
- Celý systém je anonymní
Data
- data dostupná uzlům v systému
- každé téma má název
- data jsou uložena a přenášena ve standardních datových typech ROS
- obecně jsou data streamovaná, ale nemusí být.
Datové typy
- stdmsgs/int32
- stdmsgs/float32
- geometrymsgs/Point
- geometrymsgs/Pose
- navmsgs/Odometry
- navmsgs/Path
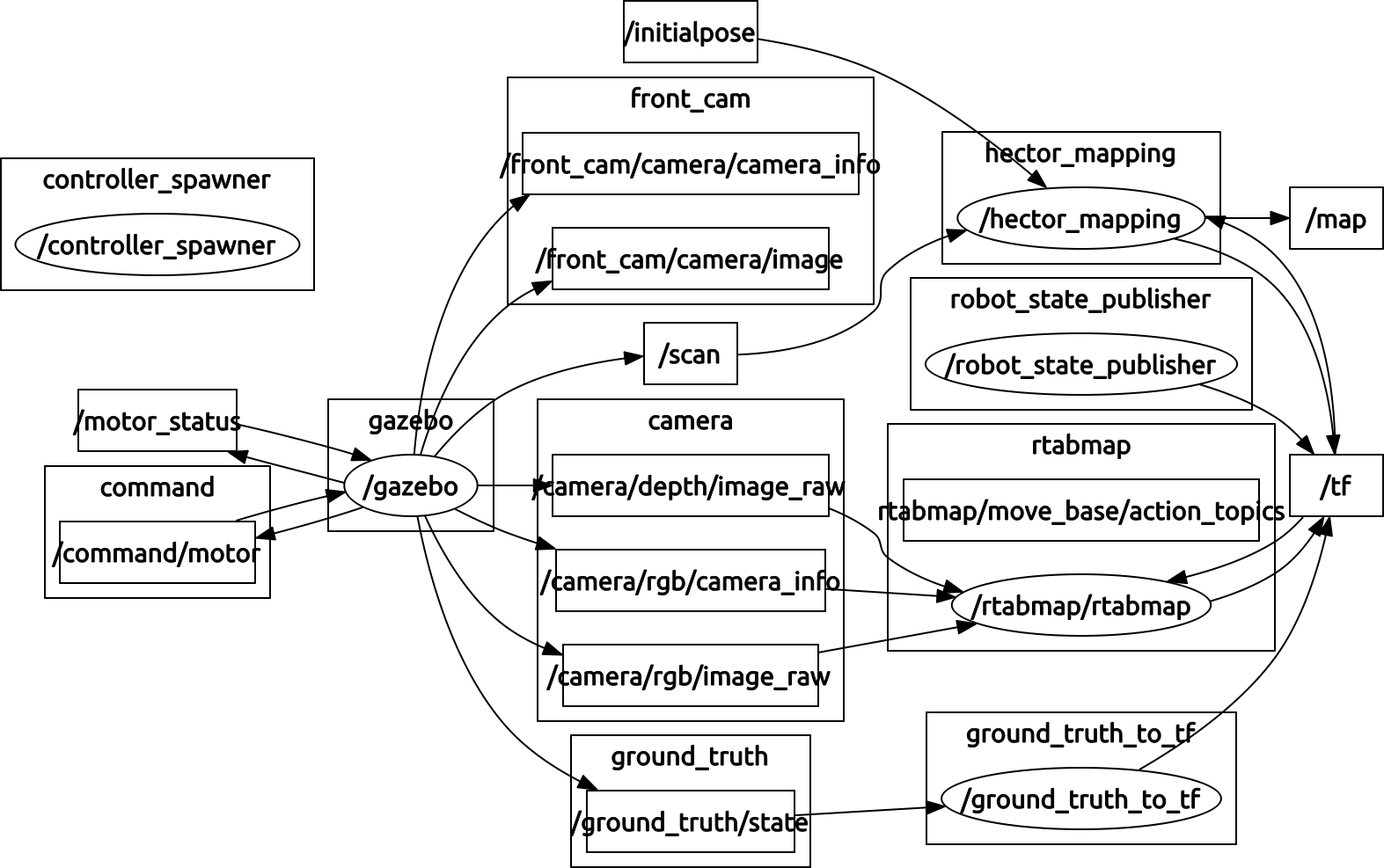
Předávání zpráv
Obrázek místo slov RQT Graph
Cvičení - napojíme se na robota!!
Rosbridge
Standardní komunikace v ROS2 je pomocí DDS protokolu. Užívá UDP packety a funguje defaultně v jednom subnetu.
rosbridge
- protokol postavený na JSON
- rosbridge server - komunikace pomocí websocket -> snandé vzdálené připojení
roslibpy
- python knihovna
roslibpy - cviceni.py
- želva - dokumentace